








Fondata nel 2001, è un'impresa high-tech nazionale che integra ricerca e sviluppo, produzione, vendita e servizio post-vendita.
CERCA QUELLO CHE VUOI
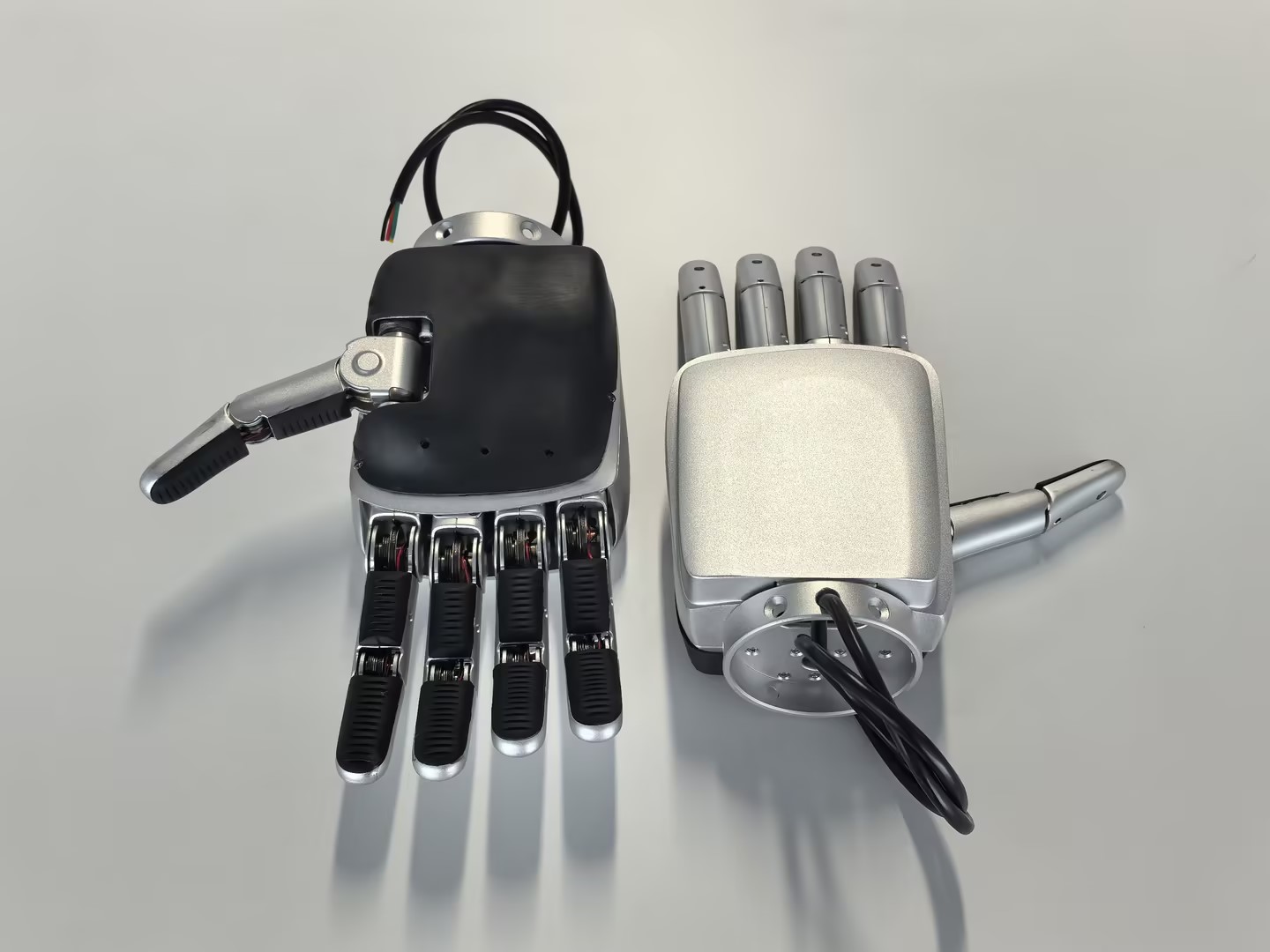
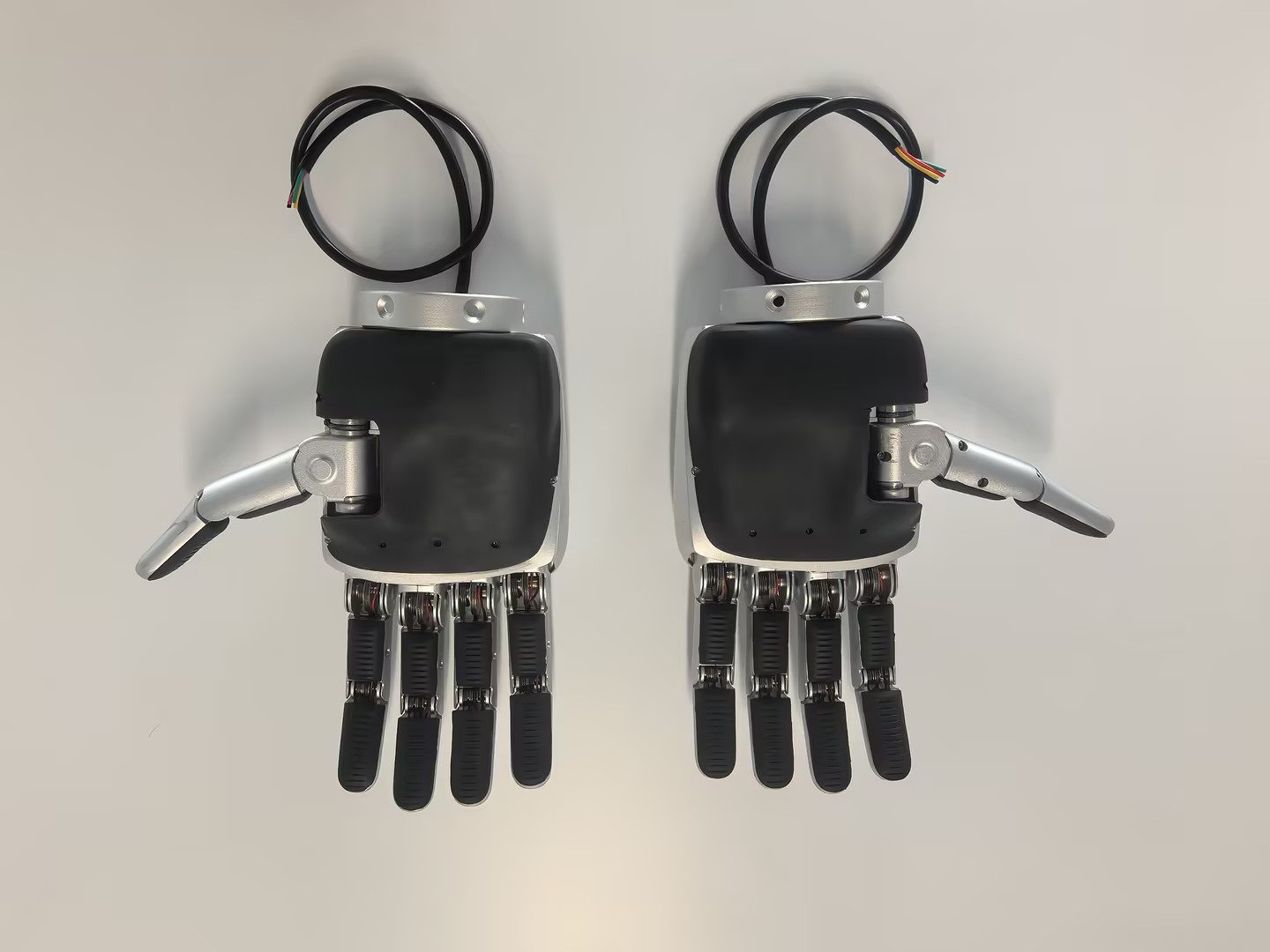
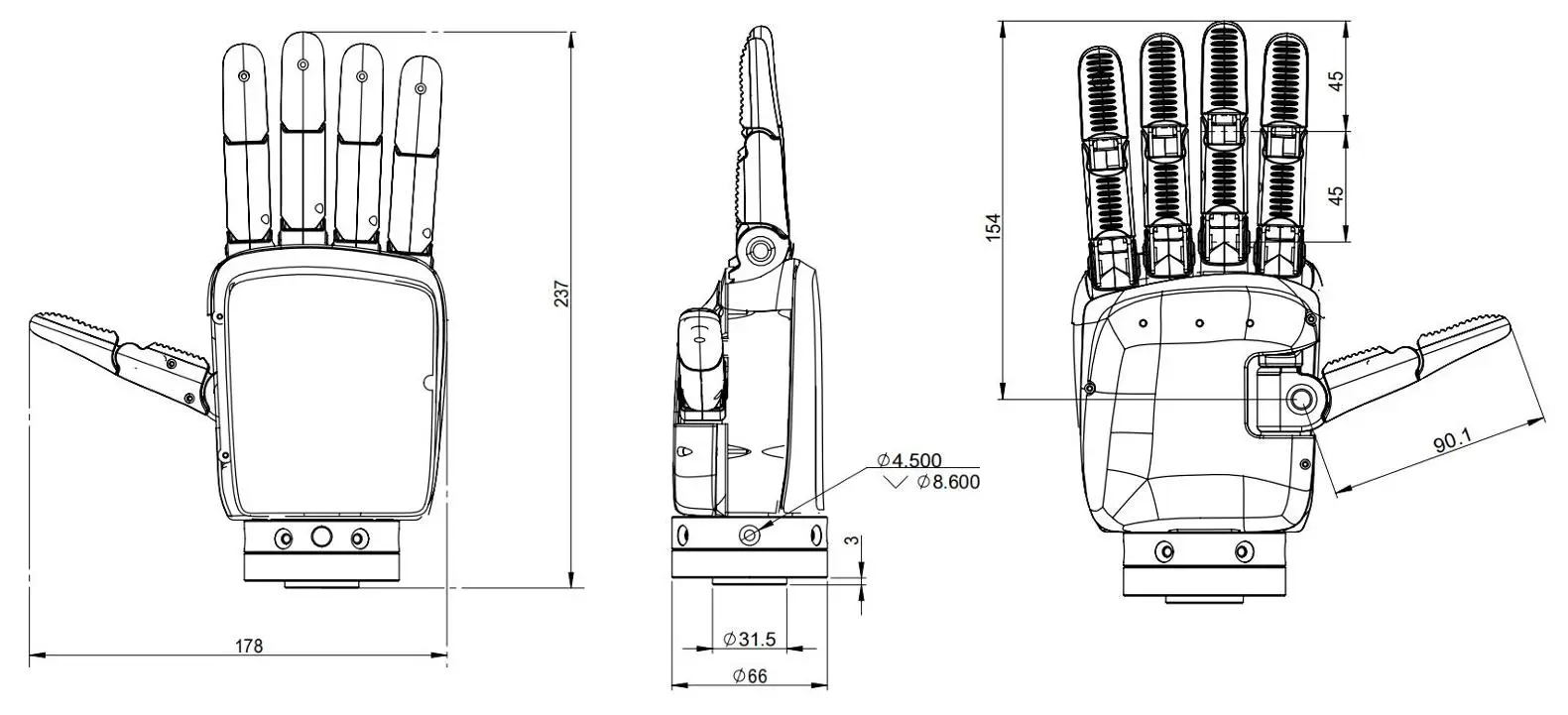
| LZ001 Mano Dexterous industriale | |||
| Indice dei dati | |||
| Numero di dita | 5 | Ciclo di vita | 1 milione cicli |
| Grado di libertà | 11 | Sensore di pressione delle dita | Dieci |
| Numero di unità | 6 | Cavo-guidato | |
| Resistenza agli urti congiunta | Supporto | Tensione di funzionamento | DC48V ± l0% |
| Peso netto | 1,2kg | Corrente di funzionamento | 4A |
| Forza di pizzicamento massima | 10kg | Interfaccia di controllo | Modbus485 / EtherCAT |
| LZ002 Mano Dexterous industriale | |||
| Indice dei dati | |||
| Numero di dita | 5 | Ciclo di vita | 1 milione cicli |
| Grado di libertà | 15 | Sensore di pressione delle dita | Cinque |
| Numero di unità | 6 | Unità di collegamento | |
| Tempo di presa | 0,3 s | Tensione di funzionamento | DC48V ± l0% |
| Peso netto | 500 g | Corrente di funzionamento | 2A |
| Forza massima | 3kg | Interfaccia di controllo | Modbus485 / EtherCAT |
| LZ010 Guanto dati | |||
| Indice dei dati | |||
| Numero di sensori Flex / Angle | 10 | Numero di IMU | 6 |
| Risoluzione angolare | 0.01° | Gamma dell'accelerometro | ± 18 g |
| Accuratezza di atteggiamento | ≤ 0.5° | Interfaccia | USB ed Ethernet |
| Latenza di comunicazione | ≤ 20 ms | Peso del guanto | 100 ± 5 g |
| Integrazione di simulazione senza soluzione di continuità | motori fisici come Mujoco e Isaac Lab | Kit di sviluppo (SDK) per lo sviluppo personalizzato. | |
| Esportazione dati | Fornisce interfacce plugin e API per strumenti di terze parti, tra cui Unity, Unreal Engine (UE) e MotionBuilder. | Riproduzione dati | Il software sostiene il playback di dati, domanda e salva le funzioni. Sostiene i formati di dati di moto standard compreso BVH e FBX e fornisce un software |
Fondata nel 2001, è un'impresa high-tech nazionale che integra ricerca e sviluppo, produzione, vendita e servizio post-vendita.
Diritto d'autore © 2024 Kailong alta tecnologia Co., Ltd.
Offerto daiglobalwin.com